4-variable Kalman estimation of ball tracking problem
Contents
First set model parameters and generate truth
u0 = -20;
w0 = 20;
r0 = 80;
z0 = 0;
g = 9.8;
sigo = 0.001;
dt = 0.1;
N = 40;
t = (0:(N-1))*dt;
rtrue = r0 + u0*t;
ztrue = w0*t - 0.5*g*t.^2;
ytrue = atan(ztrue./rtrue);
yo = ytrue + sigo*randn(1,N);
Kalman estimation of state vector x = [r z u v]'
xhat = nan(4,N);
sigr = nan(1,N);
sigz = nan(1,N);
sigu = nan(1,N);
sigw = nan(1,N);
uguess = -10;
vguess = 5;
xhat(:,1) = [r0 0 uguess vguess];
rvar0 = 10;
zvar0 = 1;
uvar0 = 10^2;
wvar0 = 10^2;
Chat = diag([rvar0 zvar0 uvar0 wvar0]);
Co = sigo^2;
F = [1 0 dt 0; 0 1 0 dt; 0 0 1 0; 0 0 0 1];
for n = 2:N
rhat = xhat(1,n-1);
zhat = xhat(2,n-1);
uhat = xhat(3,n-1);
what = xhat(4,n-1);
xp = [rhat + uhat*dt; zhat + what*dt - 0.5*g*dt^2; ...
uhat; what - g*dt];
Cp = F*Chat*F';
rp = xp(1);
zp = xp(2);
hp = atan(zp/rp);
H = [-zp rp 0 0]/(rp^2 + zp^2);
K = Cp*H'/(H*Cp*H' + Co);
Chat = (eye(4)-K*H)*Cp;
xhat(:,n) = xp + K*(yo(n) - hp);
sigr(:,n) = sqrt(Chat(1,1));
sigz(:,n) = sqrt(Chat(2,2));
sigu(:,n) = sqrt(Chat(3,3));
sigw(:,n) = sqrt(Chat(4,4));
end
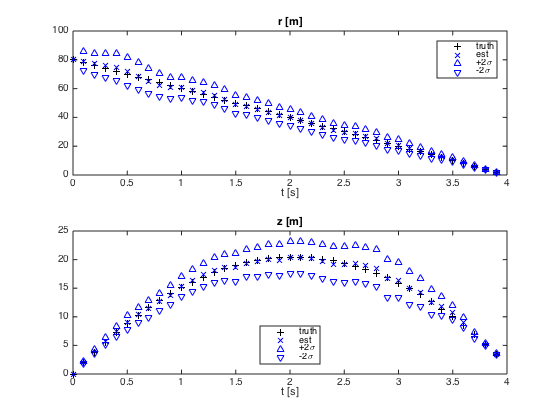
Output results
rhat = xhat(1,:);
zhat = xhat(2,:);
figure(1)
clf
subplot(2,1,1)
plot(t,rtrue,'k+',...
t,rhat,'bx',...
t,rhat+2*sigr,'b^',...
t,rhat-2*sigr,'bv')
xlabel('t [s]')
legend('truth','est','+2\sigma','-2\sigma','Location','NorthEast')
title('r [m]')
subplot(2,1,2)
plot(t,ztrue,'k+',...
t,zhat,'bx',...
t,zhat+2*sigz,'b^',...
t,zhat-2*sigz,'bv')
xlabel('t [s]')
legend('truth','est','+2\sigma','-2\sigma','Location','South')
title('z [m]')
Time series of angle y vs. observation
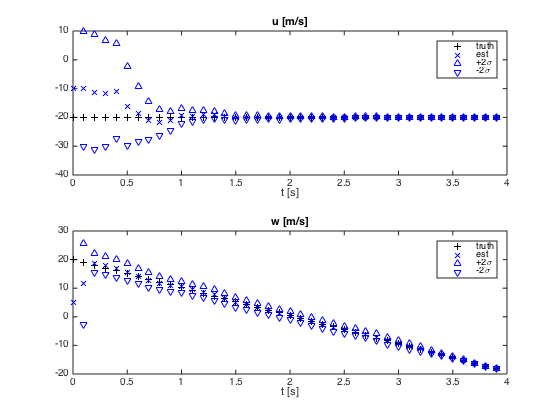
Time series of estimated velocity components
figure(2)
clf
uhat = xhat(3,:);
utrue = u0*ones(1,N);
subplot(2,1,1)
plot(t,utrue,'k+',...
t,uhat,'bx',...
t,uhat+2*sigu,'b^',...
t,uhat-2*sigu,'bv')
xlabel('t [s]')
legend('truth','est','+2\sigma','-2\sigma','Location','NorthEast')
title('u [m/s]')
what = xhat(4,:);
wtrue = w0 - g*t;
subplot(2,1,2)
plot(t,wtrue,'k+',...
t,what,'bx',...
t,what+2*sigw,'b^',...
t,what-2*sigw,'bv')
xlabel('t [s]')
legend('truth','est','+2\sigma','-2\sigma','Location','NorthEast')
title('w [m/s]')
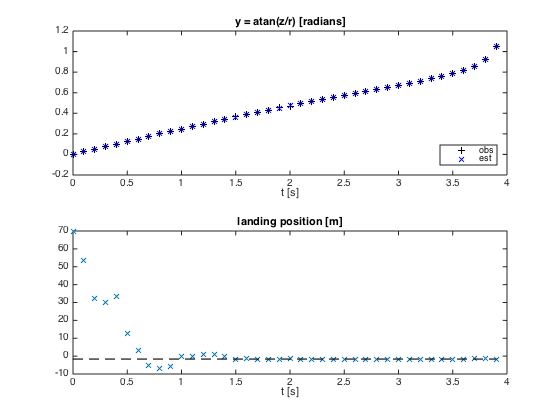
Consistency with obs, and estimated landing position
figure(3)
clf
yhat = atan(zhat./rhat);
subplot(2,1,1)
plot(t,yo,'k+',t,yhat,'bx')
xlabel('t [s]')
legend('obs','est','Location','SouthEast')
title('y = atan(z/r) [radians]')
subplot(2,1,2)
dtf = (what + sqrt(what.^2 + 2*g*zhat))/g;
rf = rhat + uhat.*dtf;
rftrue = r0 + 2*u0*w0/g;
plot(t,rf,'x',t,rftrue*ones(1,N),'k--')
xlabel('t [s]')
title('landing position [m]')